
DASA
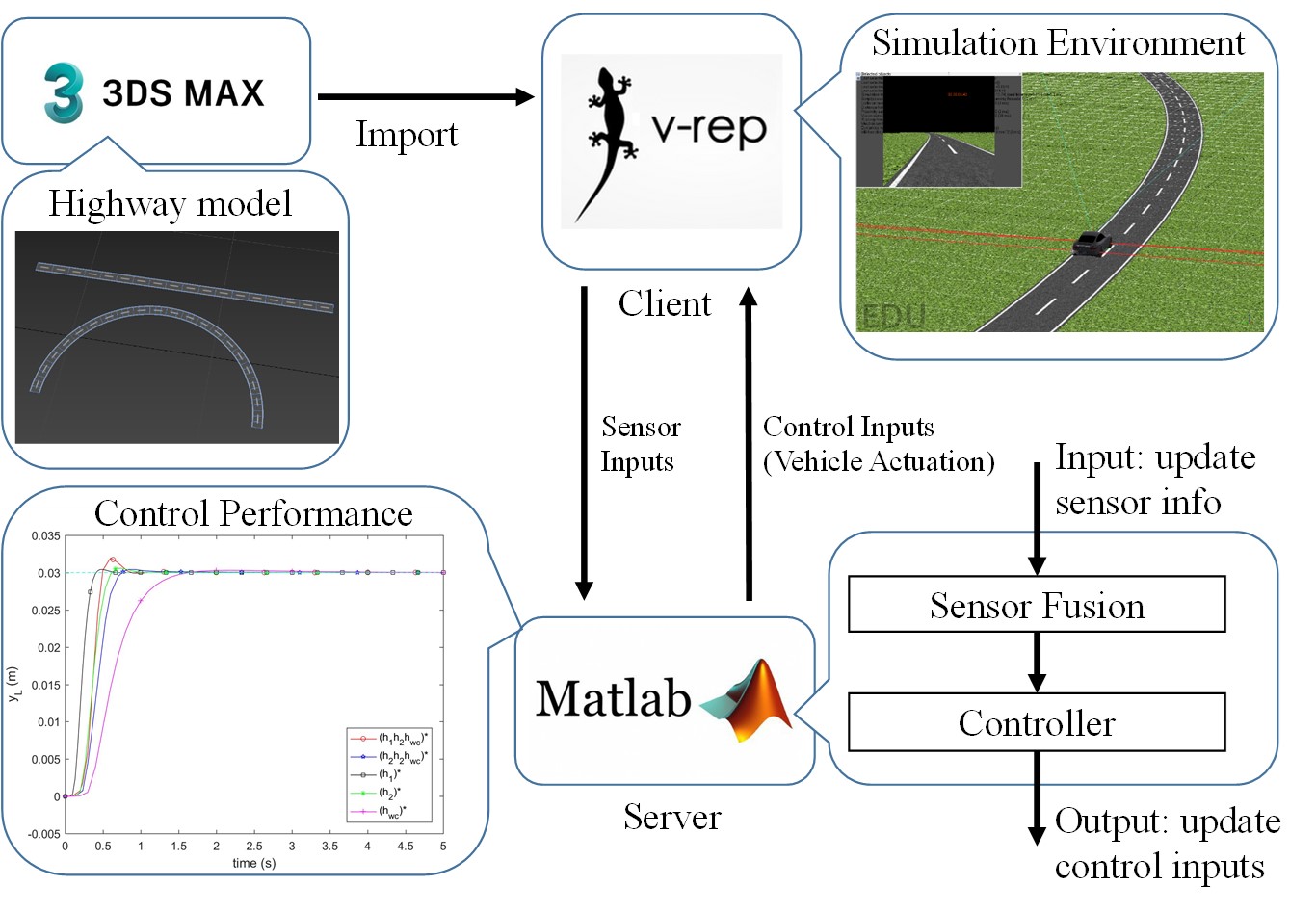
DASA is an open-source design, analysis, and simulation framework for automotive Image-Based Control (IBC) systems that can consider the change in vehicle dynamics in real-time and produces real-time dynamic image stream as per the control algorithm. Our framework models the 3D environment in 3ds Max, simulates the vehicle dynamics, camera position, environment and traffic in V-REP and computes the control output in Matlab. Our framework runs Matlab as a server and V-REP as a client in synchronous mode.
You can find details for installation and usage here.
A video of the DASA framework for a vision-based lateral control example can be found here.